
На большой стадии производства гибкий роботизированный манипулятор малой грузоподъемности подобен восходящей звезде, кардинально меняющей модель производства.Он играет все более важную роль в сфере производства, обеспечивая большую гибкость и эффективность производства и становясь ключевой силой в содействии трансформации и модернизации обрабатывающей промышленности в сторону большей гибкости.
Гибкий роботизированный манипулятор малой грузоподъемности, гибкая работа
Гибкий роботизированный манипулятор малой грузоподъемности обычно имеет грузоподъемность менее нескольких килограммов, но его возможности нельзя недооценивать. По сравнению с традиционными жесткими роботизированными руками, он похож на гибкого «танцора» из научно-фантастического фильма, способного легко сгибаться, растягиваться и скручиваться. Гибкий роботизированный манипулятор малой грузоподъемности обычно понимают машину с грузоподъемностью менее нескольких килограммов. По сравнению с традиционными жесткими роботизированными руками его особенностью является «гибкость».
Если взять в качестве примера производство продукции, то роботизированные манипуляторы на производственной линии можно назвать «мастерами» точной сборки. При работе с небольшими компонентами, такими как мобильные телефоны и компьютеры, они могут использовать свои гибкие «тела» для гибкого перемещения в небольшом пространстве, точного захвата и размещения крошечных компонентов, искусно обходить сложные схемы и конструкции вокруг них, выполнять высокоточные операции и избегать повреждения хрупких компонентов, что значительно повышает качество продукции и эффективность производства.
Взаимодействие человека и машины, совместная работа
В области коллаборативных роботов гибкий роботизированный манипулятор малой грузоподъемности являются надежными «рабочими партнерами» человека. В сценарии совместной работы человека и машины гибкий материал, используемый в гибкий роботизированный манипулятор малой грузоподъемности, подобен надеванию на нее слоя «защитной одежды». Когда она случайно сталкивается с людьми, она может быстро почувствовать и эффективно буферизовать, снижая риск получения травмы и позволяя операторам работать со спокойной душой.
В сфере реабилитации также хорошо зарекомендовали себя гибкий роботизированный манипулятор малой грузоподъемности. Являясь устройством, помогающим в реабилитационных тренировках, он может гибко регулировать силу и амплитуду движений в соответствии с физическим состоянием пациента и прогрессом реабилитации, подбирать индивидуальные планы реабилитации для пациентов и помогать пациентам восстанавливать здоровье в кратчайшие сроки.

Технологическая поддержка, точный контроль
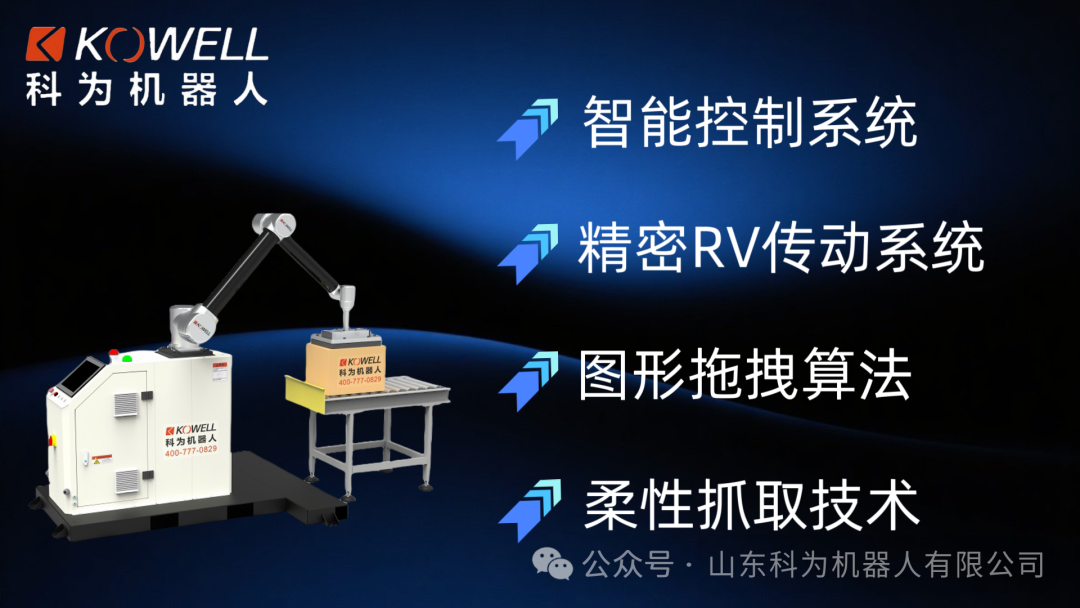
«Умный мозг» гибкий роботизированный манипулятор малой грузоподъемности состоит из передовой сенсорной технологии и технологии управления движением. Датчики положения и датчики усилия являются «глазами» и «антеннами» роботизированной руки, воспринимающими внешний мир. Датчик положения отслеживает положение сочленения в режиме реального времени, гарантируя, что роботизированная рука движется по заданной траектории; датчик силы может определять внешнюю силу, позволяя роботизированной руке вовремя корректировать свое движение в соответствии с обратной связью по усилию, чтобы избежать повреждения объектов.
Алгоритмы искусственного интеллекта дают роботизированной руке возможность обучаться и принимать решения самостоятельно. Он может быстро изучать и оптимизировать стратегии работы в соответствии с различными требованиями к задачам, как опытный мастер, постоянно повышая эффективность и точность работы. Технология управления движением делает каждое движение роботизированной руки точным и плавным, обеспечивая точный контроль движения.
Области применения, универсал
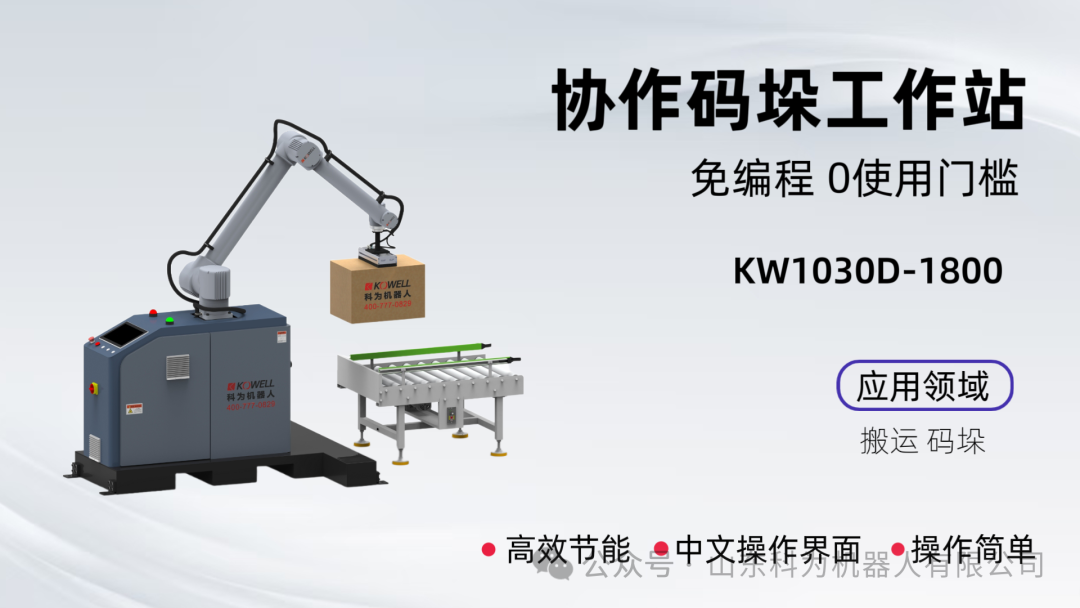
Области применения гибкий роботизированный манипулятор малой грузоподъемности чрезвычайно широки. В пищевой промышленности он превращается в аккуратного «носильщика», который аккуратно захватывает продукты, выполняет задачи по сортировке, упаковке и транспортировке, обеспечивая целостность продуктов. В сфере логистики и складирования он тесно взаимодействует с автоматизированной логистической системой, свободно перемещаясь между узкими стеллажами, точно захватывая и размещая товары, а также значительно улучшая использование складских площадей и эффективность логистики.
Перспективы на будущее, неограниченный потенциал
Заглядывая в будущее, можно с уверенностью сказать, что разработка малогабаритных роботизированных манипуляторов выглядит захватывающей. Благодаря быстрому развитию таких технологий, как Интернет вещей и большие данные, он станет более гибким. Благодаря интеграции этих технологий роботизированная рука будет обладать более совершенными возможностями автономного принятия решений и интеллектуального взаимодействия, а также сможет выполнять более сложные и замысловатые задачи.
Достижения в области материаловедения также откроют новые горизонты в области создания гибких роботизированных рук. Постоянное появление новых гибких материалов еще больше повысит производительность и надежность роботизированных рук, что позволит им играть важную роль в большем количестве областей. Будучи «гибкой ролью» в обрабатывающей промышленности, гибкий роботизированный манипулятор малой грузоподъемности ведет обрабатывающую промышленность к более эффективному, гибкому и многофункциональному будущему.



Пожалуйста, оставьте нам сообщение
Пожалуйста, введите свой адрес электронной почты, и мы ответим на ваше письмо.