
Благодаря стремительному развитию науки и техники продолжает появляться интеллектуальное автоматизированное оборудование, кардинально меняющее наше производство и образ жизни. Будучи лидером среди них, четырехосевой интеллектуальный роботизированный манипулятор постепенно становится ключевым оборудованием во многих областях, таких как промышленное производство и научно-исследовательские эксперименты, возглавляя новую тенденцию интеллектуальной автоматизации благодаря своим уникальным преимуществам и широкому потенциалу применения.
Структура и принцип работы четырехосевой интеллектуальный роботизированный манипулятор
Четыре оси управляют движением в разных направлениях, в основном включая вращение плеча, вращение локтя, вращение запястья и вращение конечного эффектора. Благодаря серводвигателю и точному передаточному механизму достигается точное позиционирование и работа. Конструктивно интеллектуальная четырехосевая роботизированная рука в основном состоит из четырех вращающихся осей. Эти четыре оси работают вместе, чтобы дать роботу возможность гибко перемещаться в пространстве. Его структура компактна и проста. По сравнению с многоосевыми манипуляторами, четырехосевой интеллектуальный роботизированный манипулятор имеет преимущества в контроле затрат и сложности обслуживания, а также удовлетворяет потребности в свободе передвижения во многих сценариях.
Области применения
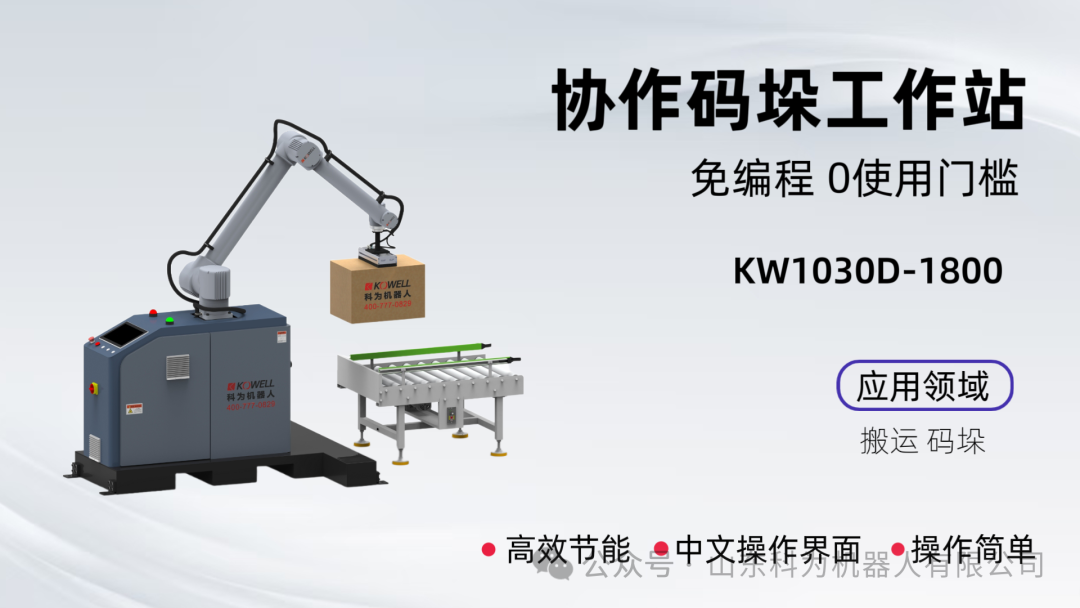
четырехосевой интеллектуальный роботизированный манипулятор используются для монтажа микросхем, вставки печатных плат и т. д. в электронном производстве; для обработки и сборки деталей в автомобилестроении; для сортировки и упаковки продуктов питания в пищевой промышленности; а также для обработки грузов и паллетирования в логистической отрасли.

Преимущества
Повышение эффективности производства: четырехосевой интеллектуальный роботизированный манипулятор может работать 24 часа в сутки без перерыва и имеет высокую скорость движения. Она может быстро выполнять такие операции, как обработка и сборка, что значительно сокращает производственный цикл. Например, на заводах по производству электроники он может быстро захватывать и устанавливать крошечные электронные компоненты, что значительно повышает скорость производства по сравнению с ручными операциями.
Повышение качества продукции: высокая точность позиционирования обеспечивает последовательность и стабильность работы, снижает различия в качестве продукции, вызванные человеческим фактором, и повышает уровень квалификации продукции.
Сокращение затрат на рабочую силу: четырехосевой интеллектуальный роботизированный манипулятор может заменить рабочую нагрузку нескольких рабочих, снизив зависимость завода от рабочей силы. В долгосрочной перспективе, хотя первоначальная стоимость закупки оборудования высока, это может эффективно снизить затраты на рабочую силу, особенно в настоящее время, когда затраты на рабочую силу растут, преимущество становится более заметным.
Улучшение рабочей среды: четырехосевой интеллектуальный роботизированный манипулятор может работать в некоторых опасных и суровых условиях, таких как высокая температура, пыль, токсичные и вредные среды, чтобы предотвратить прямое воздействие этих сред на рабочих. Например, в химическом производстве робот может выполнять такие задачи, как погрузка-разгрузка материалов и добавление.
Повышение гибкости производства: благодаря программированию рабочие задачи и процессы можно быстро корректировать для удовлетворения производственных потребностей различных продуктов. Когда фабрика получает заказ на новый продукт, она может быстро перепрограммировать и отладить робота, а также быстро переключить производство, повышая гибкость и оперативность производства. Конструкция относительно проста, стоимость низкая, обслуживание простое; рабочее пространство большое, скорость движения высокая, и он может удовлетворить потребности в быстрых задачах захвата и перемещения; он обладает высокой гибкостью и может выполнять различные сложные движения в определенном пространстве.
Потенциал будущего развития
Благодаря быстрому развитию таких технологий, как искусственный интеллект, Интернет вещей и большие данные, четырехосевой интеллектуальный роботизированный манипулятор станет прорывом в развитии интеллекта. В будущем он будет обладать более развитыми возможностями автономного обучения и сможет постоянно оптимизировать собственные операционные процессы и стратегии путем анализа и обучения на основе больших объемов производственных данных. Например, в электронном производстве, сталкиваясь с постоянно меняющимися электронными изделиями и сложными и постоянно меняющимися производственными процессами, четырехосевой интеллектуальный роботизированный манипулятор может автономно изучать новые методы сборки и методы контроля, а также быстро адаптироваться к производственным потребностям новых изделий. В то же время, с помощью технологии Интернета вещей, четырехосевой интеллектуальный роботизированный манипулятор будет осуществлять взаимосвязь и обмен данными между устройствами, становясь ключевым узлом в интеллектуальной производственной системе. На умном заводе он может работать совместно с другим производственным оборудованием, логистическими системами и т. д., гибко корректировать производственные планы и распределение материалов в соответствии с текущими производственными потребностями и состоянием запасов, а также значительно повышать эффективность производства и использования ресурсов.



Пожалуйста, оставьте нам сообщение
Пожалуйста, введите свой адрес электронной почты, и мы ответим на ваше письмо.